SWITCHIN
My personal graduate project | 4 Month Jan.2020-May.2020
Vehicle human-computer interaction system based on automatic assisted driving. In this design work, I mainly discuss the issue of "trust boundary" for the users in the HMI system under the context of man-machine co-driving. The interaction process can relieve the driver of the driving burden temporarily, but can also enable the driver to stay alert to some extent, so that they can return to driving mode at anytime.

The Context
The Context
Research Background and Status
The development trend of autonomous driving and smart cars: With the rapid development of intelligent 5G communication technology, the widespread use of human intelligence, intelligent platforms such as big data and cloud computing technology, their integration with traditional automobile design and manufacturing fields has led to the evolution of the automobile field toward intelligence and grid connection.
Definition of concepts related to autonomous driving: Autonomous driving refers to the driving process in which a car senses the driving environment and road conditions around the car through sensor devices on the car, learns the driving behavior through in-depth simulation and evaluation of potential road conditions by human intelligence algorithms, and then quickly makes a judgment, designs a driving route and driving style, and then feeds the control system to perform actual operations such as braking and steering wheel control. The steps can be broken down into the perception layer, the decision layer, and the implementation layer. The six different stages of autonomous driving Level 0-5, as defined by SAE International's technical standard J3016, are used internationally, and this level also defines the driving tasks to be performed by drivers in different autonomous driving states.
Ethical and moral issues in self-driving cars
Problem Overview
The "trust boundary" is brought to the user in the HMI design under the context of human-machine co-driving. Trust" is a contradictory concept here, because it allows the driver to be free from the burden of driving temporarily, but also requires the driver to be somewhat distrustful, so that he can return to driving at any time in any situation. Therefore, if the driver can learn from the HMI system to know the exact information of the current state of the vehicle and the trust boundary of the vehicle's own processing information, when faced with unexpected complex situations, the car and people can make the most appropriate response to respond calmly.
Overall Goal
Through different scenarios of driving rights switching exploration, gradually figure out a set of in-vehicle interaction design system
Research
Approach to the driver-Driving behavior and population analysis
Takeover process: For the driver, the takeover process is both a behavioral and a psychological process. However, when the running autonomous driving system sends a takeover request, the driver, who is otherwise distracted by other non-driving activities, needs to shift his attention back to the driving scenario, i.e., shift his eyes to the road ahead to observe; at the same time, the driver will put both hands and feet back to the steering wheel and the corresponding pedals to prepare for the behavior.

Definition
Dig into the problem
Trust boundaries for self-driving cars: In this case, the driver's trust in the driving system is critical. "Trust" is a contradictory concept here. It allows the driver to escape the burden of driving temporarily and requires the driver to be somewhat distrustful so that he can return to driving at any time in any situation. When. Therefore, if the driver can learn from the HMI system the exact information about the vehicle's current state and the vehicle's trust boundary to process the information on its own, the car and the person can make the most appropriate response to deal with the unanticipated complex situation. Trust comes more from the sense of control, the level of information available, and the current situation's predictability. Therefore, the system need to inform the driver of the predictable problem and provides real-time feedback on the vehicle and road conditions to improve the driver's trust in the system while also telling the driver of the possible driving takeover situation, forming a "trust boundary."
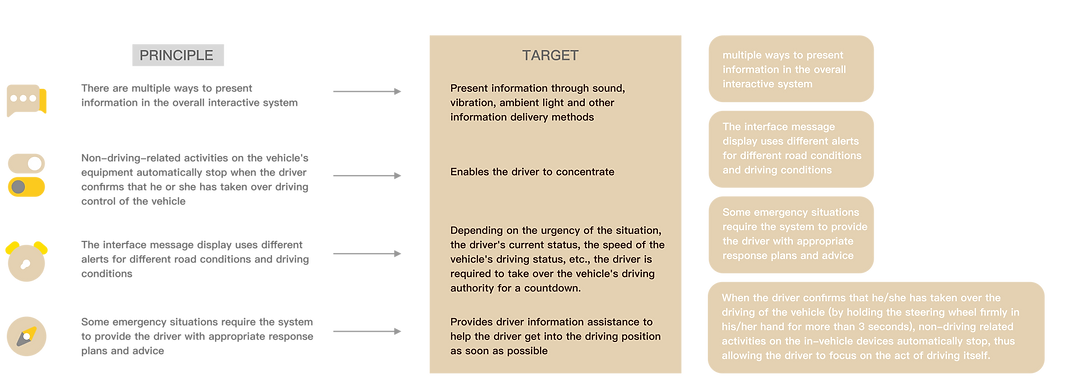
Analysis of in-vehicle human-computer interaction design principles
Through the research and analysis of earlier research results I have summarized the following design guidelines for in-car interaction design under the premise of human-computer co-driving, which will provide theoretical and principled support for my design practice
Target User and Scenario
I focus on a multi-person family travel scenario to concretize the interaction design principles I mentioned above into a scenario. This family travel scenario is a 6-8 person travel scenario in a new social context: a couple, two children, and one or both parents of the couple. The vehicle to meet this travel scenario is more inclusive and can be derived from the diversity of travel scenarios.

Ideation
Ideation
Therefore, considering the needs of such a travel scenario, I gradually determined the seating layout of the car interior - for an eight-passenger scale vehicle. The layout was explored as shown in the figure below.


Concept development-Rendering
The scenario-based conditions to meet my previous design principles and interactive interface framework became my starting point and premise for the vehicle front IP (Instrument Panel) styling design. Therefore, after trying several versions of the sketches, I decided to keep the semi-enclosed surround screen and the 3D image with light cues.



Concept development-3D Modeling

In order to better explore the shape of the front IP (Instrument Panel) of the vehicle, I made a digital model, and compared with the sketches and hand-drawn renderings in the layout exploration process mentioned before, I made some shape changes in the digital model. This change was made in order to make the front IP (Instrument Panel) better displayed in the interior space, while taking into account the practicality of interaction and the hierarchy of space.
In order to better explore the shape of the front IP (Instrument Panel) of the vehicle, I made a digital model, and compared with the sketches and hand-drawn renderings in the layout exploration process mentioned before, I made some shape changes in the digital model. This change was made in order to make the front IP (Instrument Panel) better displayed in the interior space, while taking into account the practicality of interaction and the hierarchy of space.
In order to better explore the shape of the front IP (Instrument Panel) of the vehicle, I made a digital model, and compared with the sketches and hand-drawn renderings in the layout exploration process mentioned before, I made some shape changes in the digital model. This change was made in order to make the front IP (Instrument Panel) better displayed in the interior space, while taking into account the practicality of interaction and the hierarchy of space.
In order to better explore the shape of the front IP (Instrument Panel) of the vehicle, I made a digital model, and compared with the sketches and hand-drawn renderings in the layout exploration process mentioned before, I made some shape changes in the digital model. This change was made in order to make the front IP (Instrument Panel) better displayed in the interior space, while taking into account the practicality of interaction and the hierarchy of space.
Interaction process and framework
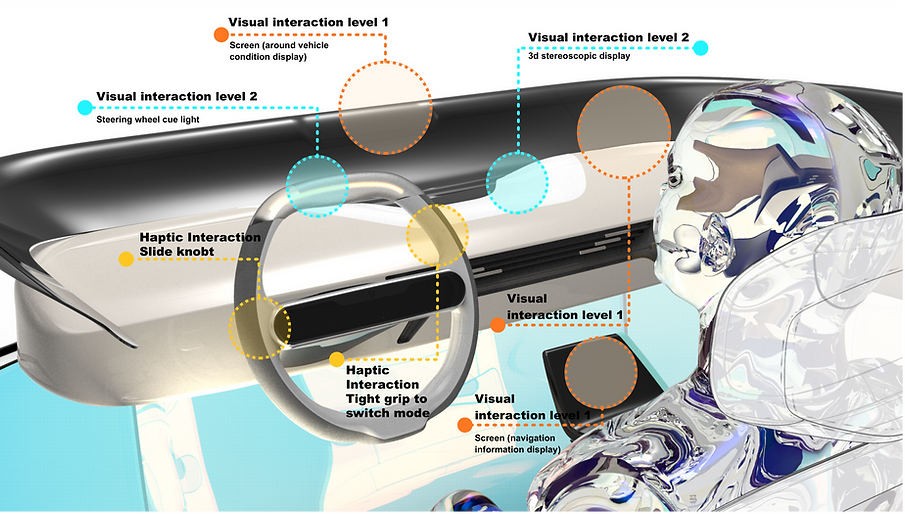
I divided the whole screen interaction into layers, respectively: visual interaction level 1, screen-based, mainly showing navigation information (autopilot confirmation, service information), vehicle information (driving information, driving speed, battery power, scenario road information, the need for driver intervention driving situation warning, situation prediction and advice); visual interaction level 2, steering wheel upper prompt light; visual interaction level 3, vehicle status intuitive indicator strip; tactile interaction layer (tight grip switch, slide knob); auditory interaction.
Final Design
User Flow
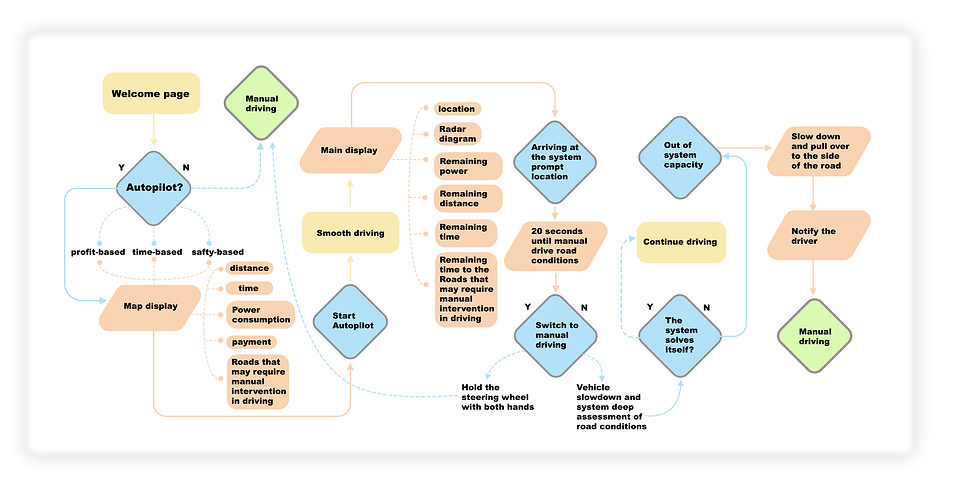

The overall interaction process is predicated on the conversion from autonomous to manual driving. It proposes two more typical scenarios where the driver passively takes over the driving authority of the vehicle: scenario one, where the car encounters an emergency (temporary roadblock ahead, the vehicle forward with no regular braking, etc.); scenario two, extreme weather conditions (rain and snow).
The user flow describes the relation and hierarchy of all pages
Mid-fi to High-fi Prototype
After determining the interaction flow and the interface framework, I started to create the specific interaction interface, whose main visual language is based on a minimalist layout



Central audio adjustment (sound volume, switching, sound playback position)


When reaching a section of road that requires driver intervention
When the vehicle reaches a road section where it should be switched to manual driving, the vehicle will give the first warning 90 seconds in advance and the second 20 seconds in advance
